


柔性機器人的柔性驅動技術之氣動人工肌肉
今年是2020年,距離牛頓被第一個蘋果砸到過去了352年,與愛因斯坦創立狹義相對論相隔了103年,距離“人工智能”這一術語的誕生也隔了62年。
得益于科學家對人類身體的研究,近來,機器文明又取得了一項進步。利用對人類脊髓的研究成果,伊利諾伊大學香檳分校研究人員使用3D打印技術制造出柔軟骨架,并以此為基礎開發了由肌肉和脊髓組織提供動力的小型步行機器人“spinobots”。
該校細胞與發育生物學教授、研究帶頭人Martha Gillette說,雖然過去已經有生物機器人可以通過簡單的肌肉收縮來前進,但脊髓的增加讓它們有了更自然的行走節奏。
Gillette說:“這些都是朝著交互式生物設備方向前進的開始,同時這些生物設備也可用于神經計算和恢復醫學。”。研究以Emergence of functional neuromuscular junctions in an engineered, multicellular spinal cord-muscle bioactuator(一種工程化多細胞脊髓肌肉生物激勵器中功能性神經肌肉連接的發現)為題,發表在了《APL生物工程》雜志上。
他們假設,一個完整的大鼠腰脊髓段可以與工程化的3D肌肉組織形成功能性神經肌肉連接,模擬周圍神經系統的部分發育。且最終的試驗數據表明,大鼠脊髓能夠在離體之后與工程肌肉組織形成功能性神經肌肉連接。下一步,研究人員計劃進一步完善自旋機器人的動作,使它們的步態更自然。研究人員希望這種小范圍的脊髓整合是建立外周神經系統體外模型的第一步,目前這在活體病人或動物模型中是很難研究的。
這不是第一次人類取得突破性的機器人進展,確實最近的一次人類在軟體機器人的突破。
1962年,美國Unimation公司的第一臺機器人Unimate在通用汽車(GM)公司投入使用,成為第一代機器人誕生的標志。此后的半個世紀里,伴隨著計算機技術、智能控制技術、通信技術以及先進制造技術等技術的發展,機器人技術得到了飛速的發展。
而軟體機器人則是科學家為了使得機器人更像人的重點努力方向。隨著機器人應用場景的多元化,逐漸提出"人機友好"的設計要求,傳統電機減速器等剛性驅動技術雖可提供較大輸出力,容易設計具有高帶寬、高性能的力驅動器,但其順應性差,在"人機交互"時安全性不高。關注公眾號三〇智工,工科領域技能人才優質崗位一鍵推薦、智能制造企業人才招聘解決方案。但進行脊髓等機器人執行器設計主要考慮的是驅動問題,柔性驅動方式憑借其適應性強、重量輕、良好的人機交融等優勢,在醫療康復和服務領域有著廣泛的應用。且隨著生物力學的發展,人體骨骼-肌肉結構的優越性愈發引起重視,柔性驅動技術在醫療康復和服務領域有著愈發廣泛的應用。
對于軟體機器人來說,由于具備高安全性以及能與人類、惡劣環境進行自適應性交互,軟體機器人擁有了傳統剛性傳機器人難以具備的功能。比如,軟體機器人在執行抓取作業時因其自身的柔軟性而能改變自身形態,對一些易碎品和不規則物體進行抓取時,采取包裹形式抓取,不會損壞物體。
而運動,往往需要肌肉發力,氣動人工肌肉,是人造肌肉(artificial muscle)的一種,是科學家認為機器人動力的來源。人造肌肉即電活性聚合物,是一種新型智能高分子材料,是根據生物學原理由纈氨酸、脯氨酸和甘氨酸這 3 種氨基酸按一定順序排列構成,可在外加電場下通過內部結構的改變而伸縮、彎曲、束緊或膨脹,非常接近生物的肌肉纖維。
氣動人工肌肉,從字面意思上理解就是,由外部的壓縮空氣驅動進行推拉動作的人造肌肉,具有柔順性、輕量性、綠色性等優勢。這一材料重量輕(最小僅為 10g),卻能提供很大的力量,用“四兩撥千斤”來形容它再合適不過了。
氣動人工肌肉往往用限制變形的支撐材料作為骨架,骨架內部是可膨脹的氣囊(或類氣囊)結構,通過氣囊的膨脹和收縮來執行各種柔順的動作,這種結構繼承了氣動元件的基本優點,同時還具備了結構簡單、高柔性和良好的仿生特征等其他機械執行機構所無法比擬的特點,是應用最為廣泛的柔性驅動方式之一。
目前,按照人工氣動肌肉的結構大致可分為類編織結構、纖維類增強結構、彈性氣室結構、增強彈性結構,當然近來也有一些新的肌肉結構。
類編織結構型氣動肌肉
20世紀50年代,美國原子物理學家Joseph L. McKibben設計出最早的氣動人工肌肉驅動器,被稱為McKibben型PMA(Pneumatic Muscle Actuator),如圖所示。一般而言,氣動人工肌肉由外部提供的壓縮空氣驅動,作推拉動作,其過程就像人體的肌肉運動。它可以提供很大的力量,而重量卻比較小,最小的氣動人工肌肉重量只有10g。

圖:McKibben型PMA (來源[2])
而這個設計當時其結構為:內層為橡膠管,橡膠管外面用纖維編織網套住,兩端用金屬挾箍密封。關注公眾號三〇智工,工科領域技能人才優質崗位一鍵推薦、智能制造企業人才招聘解決方案。當向橡膠管內腔充入壓縮氣體時,隨著內腔氣體壓力上升,橡膠管沿徑向膨脹,膨脹的橡膠管撐起外層纖維編織網,使得徑向膨脹力變為軸向收縮力,其運動形式酷似生物肌肉,這種類編制結構是人工氣動肌肉應用最多的形式。
此前,東京工業大學Giacometti機械臂便應用了這種技術,主要由薄膜氣球、McKibben型氣動肌肉、充氣導管以及提供氣源的基座組成。Giacometti 充氣臂利用人造肌肉產生的扭矩提供關節處的彎曲力,常規肌腱驅動的機械臂需要充氣臂桿在非關節處提供高強度的抗彎力,以抵抗肌腱力避免發生形變,或者設計臂桿側壁結構抵抗肌腱反作用力。

圖:Giacometti機械臂(來源[3])
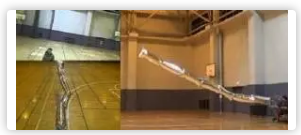
圖:Giacometti機械臂(來源[3])
纖維類增強結構型氣動肌肉
在此基礎上,為了節省成本,又一種新的氣動結構被發現了,這是由哈佛大學 Biodesign Lab實驗室開發了一種新結構的氣動肌肉。該氣動肌肉一側為固定材料,拉伸性能較差,但有良好的彎曲性能;另一側為可拉伸纖維,直接影響肌肉的彎曲性能。當可拉伸纖維伸長時,另一側固定材料不發生軸向變化,限制肌肉在該側的長度,但纖維面軸向伸長,導致肌肉回向固定材料側發生彎曲運動,反之肌肉則會向纖維側發生彎曲運動。

圖:纖維類增強結構(來源[4])
彈性氣室結構型氣動肌肉
而為了提供更強大的動力,哈佛大學Wyss Institute研究團隊利用氣壓變化研制了一種新式氣動肌肉[5]。這種形式的氣動肌肉主要組成部分為可抽氣的密封氣室。當密封氣室內氣壓與外界大氣壓相同,相互之間不產生力時,肌肉處于放松狀態;當抽出氣室中的空氣,外界大氣壓會對氣室產生作用力,使肌肉處于彎曲狀態。這種形式的氣動肌肉彎曲能力直接與大氣壓力有關,導致其負載性能較弱,輸出力有限。
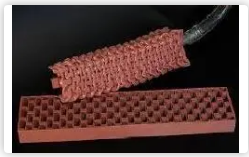
圖:彈性氣室結構約束(來源[5])
增強彈性結構型氣動肌肉
美國哈佛大學利用爆燃原理研制了一款增強彈性結構氣動肌肉,如圖5所示。該種肌肉主要部分為增強彈性材料制成的氣室。與彈性氣室結構不同的是,在增強材料結構氣室中進行甲烷的燃燒,利用甲烷爆燃產生沖擊力實現肌肉的跳躍運動。該種結構無需充氣設備,能夠提供較大作用力,但由于是爆燃產生的沖擊力,該種肌肉難以實現精確控制。

圖:增強彈性結構約束(來源哈佛大學Bi)
2000 年 FESTO 公司推出了仿生氣動肌腱系列化產品,并提供了相應的應用解決方案,標志著氣動人工肌肉進入了一個嶄新的時代,它已正式成為了一種標準的氣動執行元件。氣動人工肌肉良好的仿生特征決定了其在機器人領域廣闊的應用前景,其發展與機器人技術息息相關,兩者結合可使機器人完成更多的類人操作。
更多
2019 年 7 月,MIT 科研團隊還在 Science 發表論文,介紹了他們利用 2 種熱膨脹系數不同的聚合物材料高密度聚乙烯和環烯烴共聚物彈性體制成的新型人造肌肉,這種人造肌肉一經加熱,便可自由伸縮,提起比其自身重 650 倍的物體。這一研究也登上了當期 Science 封面。
這種纖維可以用作機器人,義肢,其他機械和生物醫學應用的人造肌肉,也可用于微小的生物醫學設備,例如通過進入動脈然后被激活的醫療機器人。極輕的重量再加上對刺激很好的反饋里都讓它從眾多材料中脫穎而出,同時這種纖維還可以被捆綁在一起使用,就像肌肉細胞在人體內的情況一樣,如此一來載荷效果更佳。
近日,國際著名期刊 Soft Robotics 刊登了哈爾濱工業大學冷勁松教授團隊與美國馬里蘭大學 Norman M. Wereley 教授團隊的共同研究成果,題為 Novel Bending and Helical Extensile/Contractile Pneumatic Artificial Muscles Inspired by Elephant Trunk(受象鼻啟發的新型彎曲螺旋可伸展/收縮氣動人工肌肉)。上述研究團隊受到象鼻的啟發,基于氣動人工肌肉(Pneumatic artificial muscles,PAMs),也研制出了一種新型柔性軟體機器人。
實際上,人造肌肉材料已成為當今研究的前沿和熱門,這與人們對柔性機器人領域越來越多的關注密不可分。柔性機器人可具備的特性包括材料的柔軟性、優良的環境適應性、超強的安全性,以及良好的人機互動性。正如香港科技大學機器人研究院院長、機械及航空航天工程學系教授王煜在 2018 年世界機器人大會上所說:
不過,想要完美地同時兼具上述幾種特性,還有很多技術上的難題,目前研究人員們也正在尋求一個突破口,比如中國科學院理化技術研究所研究員、清華大學教授劉靜團隊考慮了室溫液態金屬在柔性機器人領域的應用;MIT 研究人員曾用 3D 打印、液壓驅動的方式驅動機器人運動。
雖然現階段柔性機器人領域仍比較“概念化”,但其應用前景廣泛,未來必將會帶來新的變革。




 投訴建議
投訴建議
提交

電機的五種啟動方式原理對比
智能倉儲體系打造的4大關鍵點
工業機器人變頻器的電路分析及維修方式
工業機器人變頻器的電路分析及維修方式
機器視覺相機標定的目的、原理及步驟