


AGV激光Slam導(dǎo)航環(huán)境要求說明
2019/6/21 11:38:29

V槽導(dǎo)航對接
本導(dǎo)航系統(tǒng)目前支持SLAM導(dǎo)航模式、V槽導(dǎo)航模式、磁條導(dǎo)航模式。
AGV工作時,可以根據(jù)場景,隨時任意切換導(dǎo)航模式。使其導(dǎo)航精度和便利性達(dá)到應(yīng)用要求。
注意:上述導(dǎo)航模式的核心區(qū)別是小車反饋位置的計算方式,在路徑規(guī)劃和控制的算法上相同的。
SLAM導(dǎo)航原理
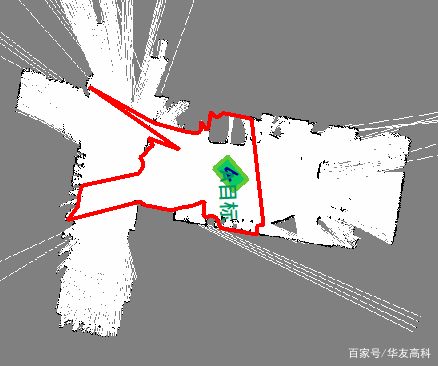
地圖顯示
地圖:灰色是未知區(qū)域,白色是已知區(qū)域,深黑色是墻壁輪廓。
紅色是激光數(shù)據(jù)輪廓。
SLAM導(dǎo)航精度和環(huán)境要求
1、根據(jù)AGV工作的路徑,分析agv行走中,離墻壁等參照物的距離。要求激光雷達(dá)的探測距離足夠遠(yuǎn),可以探測到的輪廓的總長大于1米。還需要注意同一款激光雷達(dá)對于不同顏色的物體,其探測距離是不一樣的。
如果在AGV在室外行走,建議選擇室外專用雷達(dá)。
2、AGV行走過程獲得的激光輪廓,相對于原始地圖的理想輪廓的變化量小于40%,定位精度可以穩(wěn)定在75px范圍內(nèi)。
當(dāng)輪廓變化量過大時,因為激光數(shù)據(jù)對于編碼器里程計的修復(fù)能力會下降,會導(dǎo)致隨著AGV行走的距離,定位精度逐漸線性損失。但是不用擔(dān)心AGV位置的突然遠(yuǎn)距離的跳變。
審核編輯(
王靜
)




 投訴建議
投訴建議
提交
查看更多評論
其他資訊

ethercat一拖多驅(qū)動控制
激光導(dǎo)航AGV的停車精度受環(huán)境變化的影響