


PLC編程常用邏輯梯形圖
PLC編程常用邏輯梯形圖
一、引言
PLC編程可分為順序控制和過程控制。順序控制即對開關量進行邏輯運算的控制過程,是用一些常開點,常閉點,上升觸發點,下降沿觸發點,線圈,置位復位線圈,還有定時器組合的邏輯,其對象順序結構無非是通路,支路,旁路,編程用狀態轉移法編為上策,特別要注意聯鎖,過程控制則變化較多,但歸根到底是順序控制的基礎上加一些數據處理與數學運算。
本文以AutoThink編程軟件為例,講述所有編程軟件共有的梯形圖元件和功能塊的常用邏輯。
二、正文
1、點動
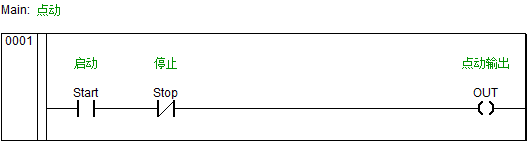
這里Start是正信號,促使結果通,一般是持續信號,Stop 是負信號,是互鎖信號或促使結果斷的信號,OUT是輸出動作信號,也可以是功能塊。可擴展Start、Stop都為一系列的信號,Start中可以加功能塊限制輸出,Stop、OUT之間可以加延時功能塊。
2、起保停
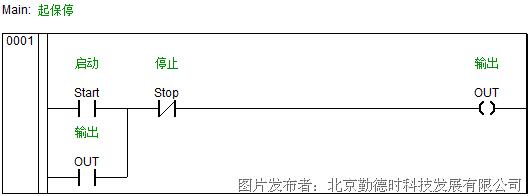
起保停邏輯的特點是將脈沖動作信號轉為持續狀態信號或持續動作信號。Start是啟動的脈沖動作信號,Stop是負信號或互鎖信號,OUT是輸出的持續信號。該邏輯可引申擴展:Stop也可以為多個信號;觸點OUT前也可加上其它信號或功能塊,即限制結果的通斷條件,Stop和線圈OUT之間可以加延時功能塊。
也可以用如下邏輯(其中Start、Stop是一系列的信號):
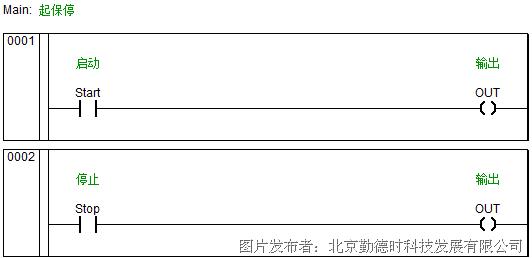
個人認為用起保停終不如用置位復位,原因是起保停的“保”在哪里難得掌握。
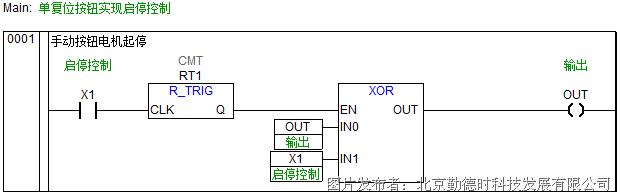
3、單復位按鈕實現啟停控制
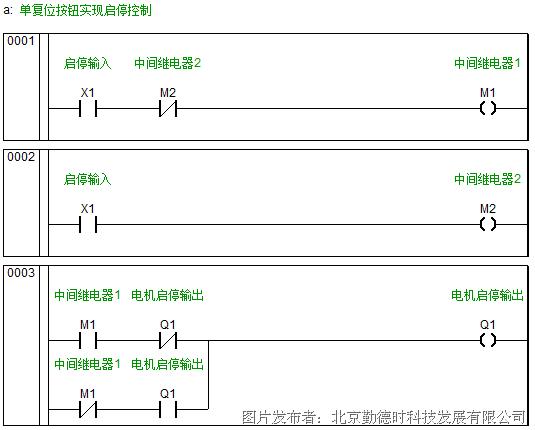
有時用戶需要使用一個自復位的按鈕來控制機器的啟停,效果是按一下啟動了,再按一下停止,再按啟動,再按停止,以此往復。這個控制較上面的兩種控制要復雜一些,事實上這是典型的異或門自鎖輸出,即判斷目前的輸出狀態為1則置0,為0則置1。對于有異或功能塊的PLC而言只需要使用XOR功能塊稍加處理即可實現,如下圖:
4、方波、脈沖制造
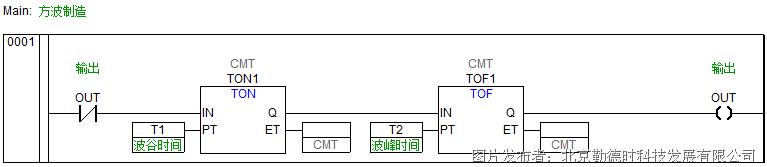
OUT為輸出的方波信號,T1是波谷時間,T2是波峰時間。如果撤掉TOF延時斷功能塊,就成為周期為T1的脈沖制造邏輯。可以在前面加觸點和功能塊限制作為方波或脈沖的產生條件。
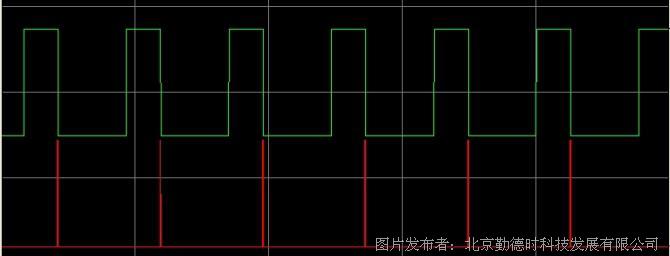
圖像如下(紅色表示TON的完成位,綠色是TOF的完成位即OUT):

5、循環數列制造
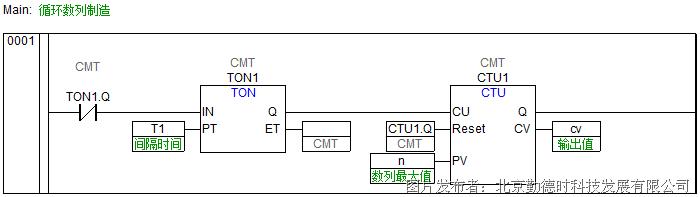
CTU計數器功能塊的CV引腳就出現周而復始的連續自然數列1、2、3、4……,n,t1是數字之間變化的時間間隔,n是連續自然數列中的最大數。
6、互鎖控制
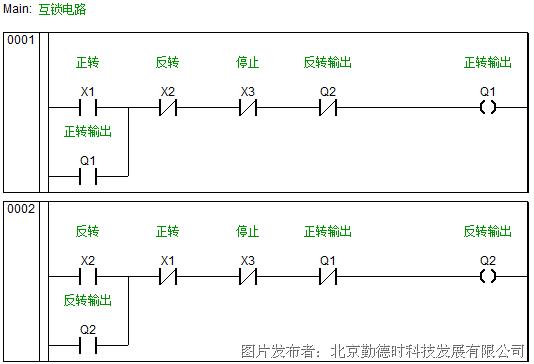
在遇到兩個輸出觸點不能同時開啟時,需要用到互鎖電路,比如三相電機的正反轉控制,如果正轉控制和反轉控制同時接通時,會造成短路。
通過將輸出觸點引處互鎖控制,可以防止兩個輸出觸點同時打開。
上圖中第1節的X2和第二節的X1可以實現誤按時停機功能,如果不需要,可以去掉。
7、順序啟動控制
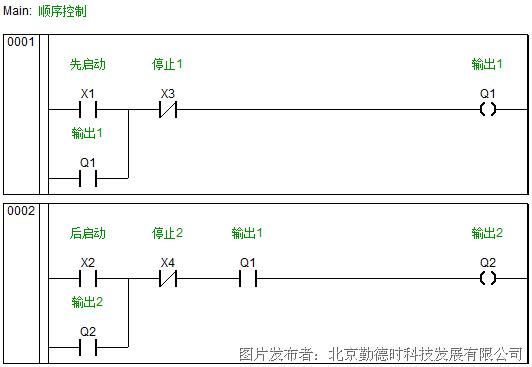
如圖所示。Q1的常開觸點串在Q2的控制回路中,Q2的接通是以Q1的接通為條件。這樣,只有Q1接通才允許Q2接通。Q1關斷后Q2也被關斷停止,而且Q1接通條件下,Q2可以自行接通和停止。X1、X2為起動按鈕,X3、X4為停止按鈕。




 投訴建議
投訴建議
提交

打好3.0工業基礎邁向4.0工業強國
物聯網和智能機器將引爆下一場技術變革?
《穹頂之下》背后折射的不合理能源結構
外資制造業接連撤離中國 人口紅利漸失
被瘋搶的智能馬桶蓋與中國制造業升級